Engineering Signals and Systems in Discrete and Continuous Time Problem 1 31
This post answers the question "What is the difference between continuous and discrete signal?" From a general point of view, signals are functions of one or several independent variables. There are two types of signals – discrete-time and continuous-time signals. Discrete-time signals are defined at the discrete moment of time and the mathematical function takes the discrete set of values.
Continuous-time signals are characterised by independent variables that are continuous and define a continuous set of values. Usually the variable indicates the continuous time signals, and the variable n indicates the discrete-time system. Also the independent variable is enclosed at parentheses for continuous-time signals and to the brackets for discrete-time systems. The feature of the discrete-time signals is that they are sampling continuous-time signals.
The signals we are describing are obviously related to the features of the system as power and energy. The total energy of the continuous-time signal over the interval is .
Here is the magnitude of the function .
Here the brackets are describing the time-continuous interval . The parentheses can be used for describing the time-continuous interval . The continuous-time power can be obtained by deriving the energy by the time interval .
The total energy of the discrete-time signal over the interval is the sum.
Where the average power over the indicated interval can be obtained with energy derived by the.
Many systems exist over the infinite interval of the independent variable. For these systems
For continuous-time, and
Some integrals and sums may not converge. These systems are characterised by the infinite energy. For converging integrals and sums, signals have a finite energy .
The average power for discrete-time and continuous-time signals for an infinite period of time are:
The signals with a finite total energy are characterised with zero average power . The signals with infinite total energy are characterised by .
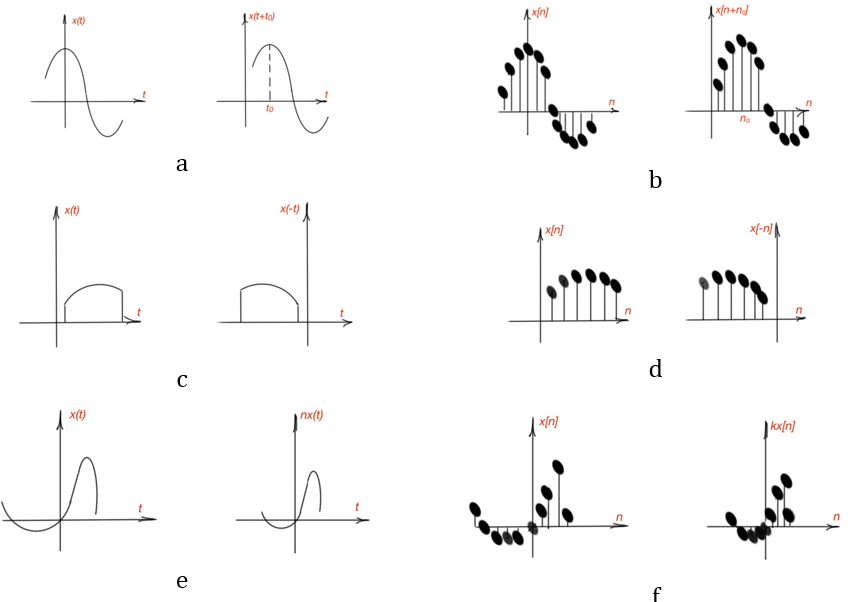
We are considering here the most simple and frequent variable transformations that can be combined, resulting in complex transformations.
- Time shift is the transformation when two signals and are the same but are displaced relatively to each other. The same for time-continuous signals and .
- Time reversal is when the signal is obtained from by reflecting the signal relatively . For continuous-time signals is a reflection over .
- Transformation , is where and are given numbers. Here the transformation depends on the value and sign of numbers, so if and the signal is extended, if and the signal is compressed, if , the signal is reversed and can be extended or compressed, depending on the magnitude and sign of the signal is shifted right or left. For discrete-time variables the transformations are the same .
Figure 1 depicts different kinds of signal transformations for continuous-time and discrete-time variables.
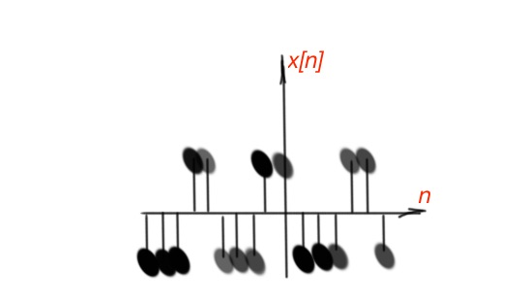
Periodic signals.
The periodic discrete-time signals with the period , where is the positive integer number, are characterised by the feature for all values. This equation also works for , … period. The fundamental period is the smallest period value where this equation works. Figure 2 depicts an example of discrete-time periodic signal.
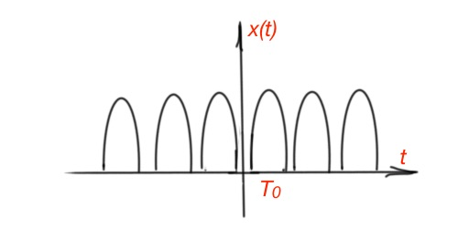
The continuous-time periodic signals with period ,are characterised by the feature . Also we can deduce that , where is an integer number. The fundamental period is the smallest period value where this equation works. Figure 3 depicts an example of discrete-time periodic signal.
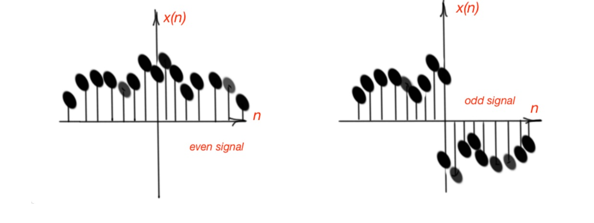
Even and odd signals.
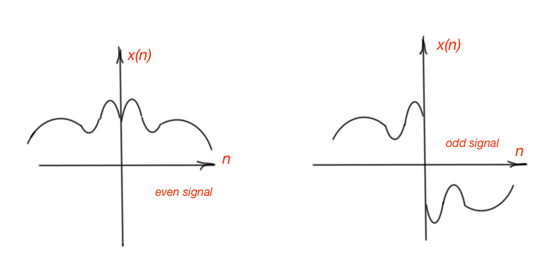
The discrete-time signal and continuous-time signal are even if they are equal to their time-reversed counterparts, and . And the signals are odd, if and . Odd signals are always 0 when , or .
Figures 4 and 5 depict even and odd discrete- and continuous-time signals.
Any continuous-or discrete-time signals can be presented as a sum of odd and even signals. For continuous-time signals:
for discrete-time signals:
More educational tutorials can be accesses as well via Reddit community r/ElectronicsEasy.
Types of signals
Source: https://www.student-circuit.com/learning/year2/signals-and-systems-intermediate/discrete-and-continuous-signals/
0 Response to "Engineering Signals and Systems in Discrete and Continuous Time Problem 1 31"
Post a Comment